Los días 13, 14 y 15 de julio representamos a Castilla y León en la competición nacional de cansat que se celebró en la ciudad de Granada. En este video de ESERO se puede ver un resumen del evento.
El concurso cansat consiste en diseñar, programar y construir un mini-satélite del tamaño de una lata de refresco. Este debe llevar a cabo una serie de misiones y mediciones mientras cae desde una altura aproximada de un kilómetro.
La misión
El cansat descendía los primeros cientos de metros con el paracaídas para posteriormente separarse de este y terminar el aterrizaje con los motores de dron.

Proceso:
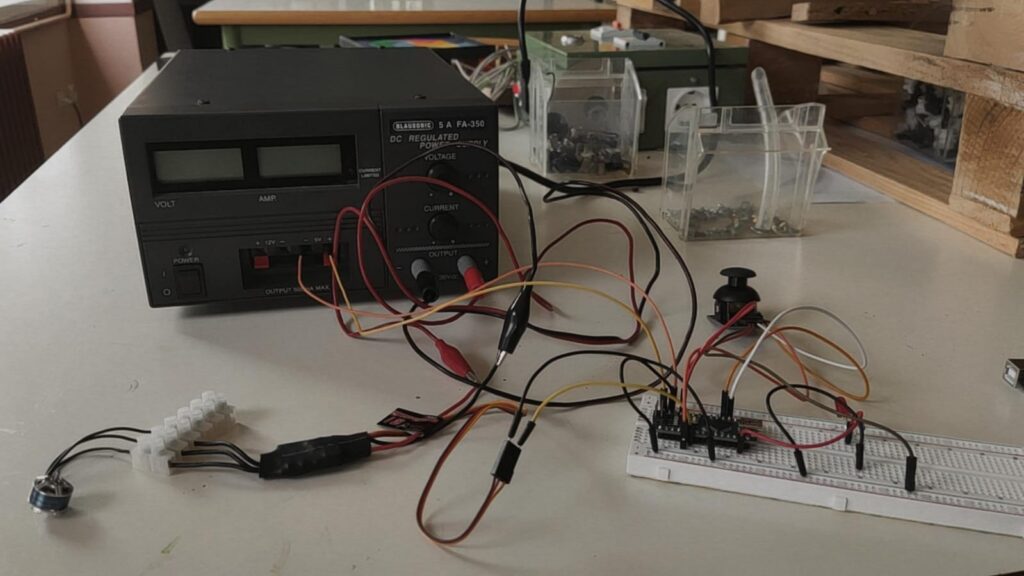
La programación de cada componente fue un proceso largo. Aquí se puede ver un resumen de los principales componentes electrónicos.


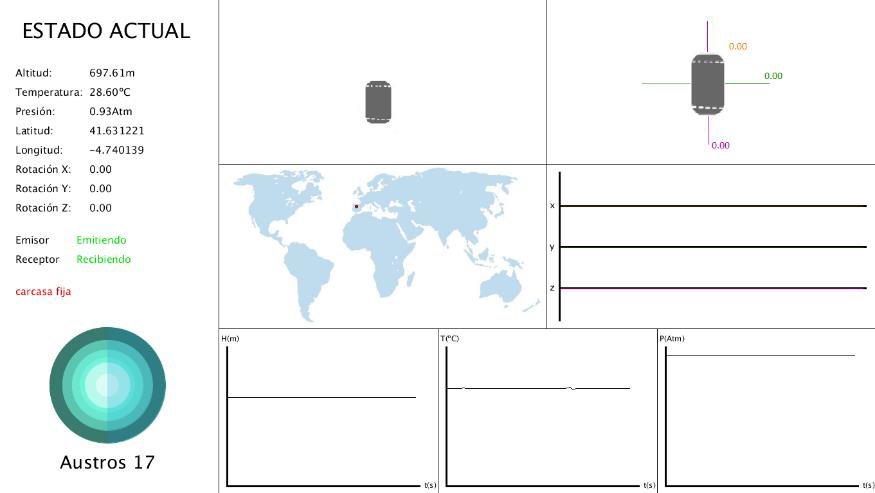
Estación de tierra
La estación de tierra era un software instalado en un ordenador que mostraba y procesaba los datos que el cansat recogía a tiempo real. Fue programada en java con processing, y mostraba en tablas y gráficos todos los datos que el cansat recogía, así como una simulación del estado y el movimiento del mismo durante el lanzamiento.
Aterrizaje
Para el aterrizaje empleamos 4 motores brushless.
El proceso de programación de los motores comenzó con la configuración de los ESC de 12A a los que van conectados. Para esto se siguió una secuencia especificada por el fabricante con la que los puntos de máxima potencia (pulso de 2ms) y mínima potencia (pulso de 1ms) quedaron registrados. A continuación, se accedió al modo de configuración y, a pesar de que se prescindió de una asignación manual de las variables, sí que se sobrescribieron algunos valores del estado predeterminado que se creyeron convenientes.
Lo siguiente fue realizar las pruebas que garantizarían el funcionamiento de los motores y confirmarían que la configuración de los ESC había sido correcta. Después se realizaron pruebas con las baterías. Primero con solo una, luego con dos en serie y en paralelo y por último con tres baterías. Se concluyó que lo óptimo era esto último.
Las últimas pruebas fueron las relacionadas con la sustentación producida con los diferentes tipos y tamaños de hélices. Una vez hecho esto, se experimentó que el código responsable del control de los motores, el cual usa PID para maximizar la estabilidad, funcionase de manera correcta.
Puedes ver el Informe de Pre-Lanzamiento y aprender más sobre nuestro proyecto a continuación: